对称性对四种泳姿的速度有什么影响?
https://doi.org/10.3390/sym14010012
摘要
四个游泳泳姿的不同特点影响着四个肢体之间的相互作用,对每只手和脚产生的力起到了约束作用。本研究的目的是分析不同数量的肢体在行动时力产生的对称性,并观察其对速度的影响。25名男子游泳运动员在全身泳和分段动作的四泳中进行了四次25米游泳。使用差压系统测量手/脚推进力,使用机械速度计测量游泳速度。根据力值计算对称指数。所有动作均呈现对侧肢体不对称(峰值力范围为6.73%至28%,平均力范围为9.3%至35.7%)。仰泳是最不对称的泳姿,其次是蝶泳、自由泳和蛙泳。与划臂相比,打腿引起的不对称性更高。不对称性和速度之间没有发现显着关联。缺乏这种关联表明,在某种程度上,游泳可能受益于对侧肢体不对称。
关键词:手力;不对称;速度;分段操作
1. 简介
在人类游泳中,分段动作充当产生推进力的螺旋桨。游泳时,上肢通过拉手臂产生推进力;而下肢则通过打。推进力与肢体的速度、划率、划幅有关,因此也与性能有关。每个游泳泳姿都有其独特的四肢协调约束,以及水下和水面上的独特轨迹。这些特征会影响推进力的产生,从而影响推力、速度和复杂性,从而使一些冲程比其他冲程更快、更复杂。
在过去的几年中,主要使用系留游泳技术研究推力。尽管这种方法有实际应用,并且提供了有用的数据,但它无法量化例如,在全身动作期间每只手/足分别产生的力。每个游泳动作固有的不同水下肢体的阶段和角度是影响协调和肌肉激活的制约因素。这将对产生的手/脚力的大小产生影响,这将导致不同的力-时间序列,因此导致不同的速度。测量更生态地(即在实际自由游泳期间)产生的力将进一步了解肢体间不对称性及其对速度的影响。
从理论角度来看,人们可以预期手臂和腿都需要产生类似的推进力,以最大化推力,减少阻力并实现最佳性能。然而,顶级游泳运动员的表现不断提高,尽管一些研究报告了从非专业游泳运动员到精英游泳运动员的对侧肢体不对称。据说不对称性起源于许多身体或训练特征,力产生中不对称的存在会导致不必要的身体旋转,从而影响阻力和每个身体侧面对推进力的不等贡献。
最终,手脚力的不对称可能最终成为影响速度和性能的推进力产生的约束。与全身动作相比,节段性动作(仅划臂和腿打)的速度模式有不太复杂的趋势,这似乎指出这些不对称性可能在节段性和全身条件下有所不同。因此,识别可能导致手/脚力量更广不对称的游泳限制(即游泳划水或游泳条件,如拉扯或打腿)可能有助于最终用户(即从业者,如教练、教师和物理治疗师)设计循证学习过程和运动控制策略,以帮助人类以更有效的方式学习并提高他们在水中的表现。因此,本研究有两个目的:(a)评估四种竞技泳姿在生态环境中,在全泳和分段泳姿条件下,手/脚力产生的力的对称性,以及(b)分析不对称性对游泳速度的影响。
据文献报道,据推测,游泳运动员在全泳姿时会表现出对侧肢体不对称。在节段性行程条件下,由于它们往往具有不太复杂的力产生模式,因此也假设存在不对称性,但程度较低。最后,假设不对称会对速度产生负面影响。
2. 材料和方法
2.1. 参与者
16名男性游泳运动员参加了这项研究)。参与者是游泳运动员,从地区到国家级,每周训练量约为16000米,个人记录分别为自由,仰泳,蛙泳和蝶泳世界纪录的85%,75%,72%和70%。作为纳入标准,所有参与者至少应是前两个竞争赛季的男性,本地和/或国家级竞争对手。相反,排除标准包括在过去<>个月内诊断出任何肌肉骨骼损伤或神经系统疾病。同样被排除在外的是那些事先报告无法参加本研究的四次预定会议的人。
所有程序均符合赫尔辛基关于人类研究的宣言,大学的机构审查委员会批准了研究设计。所有教练、父母/监护人和游泳运动员都对参与本研究表示知情书面同意/同意。
2.2. 协议
所有游泳运动员均以适度的速度进行了标准的热身,随后进行了几次冲刺,如其他部分所述。游泳运动员被随机分配在三种不同的条件下,在三个不同的条件下进行4次25米的全能比赛(自由泳,仰泳,蛙泳和蝶泳):(i)全泳(即划臂加打腿);(二)手臂拉扯(即只有手臂行程;AO);(iii)打腿(即只打腿;KO)。由于只有两个传感器只允许收集两个手臂(即,手上有传感器的全行程;FA)或双腿(即,足部有传感器的全行程;FK)当时的力数据(表1)。所有比赛都以水中推开开始,游泳运动员被指示立即开始游泳(即不允许滑翔或水下海豚打)。尽管如此,为了避免不是由游泳划程引起的运动行为的高差异,前五米(从墙上推开)和最后一米(终点)从分析中被丢弃。为了确保完全恢复,每位游泳运动员在下一场比赛前休息30分钟。进行测试的车道旁边是空的,以尽量减少阻力、吃水和其他混杂因素。每位游泳运动员在 16 次测试中进行了 4 次比赛,每次最多 4 次(总数:15 名参与者× 16 次 = 240 次试验)。
表 1.四个游泳泳姿中每个泳姿的泳姿变体、相应的首字母缩略词和传感器位置。

2.3. 数据收集
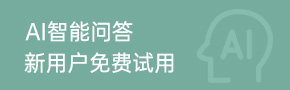
压差系统(Aquanex系统,v.4.1,型号DU2,游泳技术研究公司,美国佛罗里达州塔拉哈西)用于测量手/脚力(图1a)。该系统具有两个独立的差压传感器(A 型),通过电缆连接到处理信号 (f = 100 Hz) 的双传感器接口。每个传感器测量垂直于它的压力分量。该系统的准确性在别处有报道。尽管还有其他力成分可能起作用,但据报道,压力成分是推进力的主要贡献者。因此,假设压力分量由手/脚力表示。在每场比赛之前,游泳运动员被要求将手放在腰围水下10秒,以便用静水压力值校准系统。强制时间数据在笔记本电脑的可视界面上实时流式传输。在AO条件下,传感器放置在双手中,位于第三和第四手指的近端指骨之间。在KO条件下,传感器放置在第3和第4脚趾之间的双脚中。同时,测量游泳速度。一根绳子从游泳运动员的臀部连接到放置在游泳池头壁的起始块上的机械系统(游泳速度计,Swimsportec,希尔德斯海姆,德国)(图2b)。信号以 3 Hz 的频率采集,并通过 1 位采集卡(USB-50,NI,美国德克萨斯州奥斯汀)传输到 LabView 中的软件接口(v.12,美国奥斯汀,NI 公司),该接口实时显示速度时间数据。然后将来自两个系统的数据传输到信号处理器软件(AcqKnowledge v.6008.2010.3,Biopac Systems,美国加利福尼亚州圣巴巴拉)。残差分析后,使用7 Hz截止低通四阶巴特沃兹滤波器滤波数据。
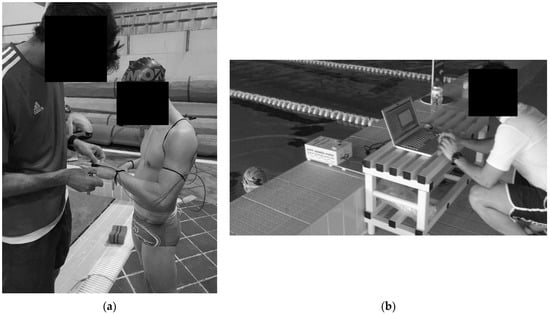
图1.(a) 将差压传感器放在第三指和第四指近指骨之间;(b) 速度计,放置在游泳池的头壁上,用绳子连接到放在游泳运动员臀部的皮带上。
2.4. 动力学和运动学变量
在信号处理软件中,峰值和平均力被计算为推进力结果。峰值力被定义为回合期间达到的最大值。平均力被定义为在整个回合中测量的值的平均值。在自由和仰泳中,打腿包括两个不同的阶段(向下和向上拍)。差压传感器用正值和负值记录这些相位,从而在平均力中施加偏差。因此,在FK和KO条件下,这些笔画的时间序列均方根计算为:

每回合获得的最高速度峰值被视为峰值速度(VPK)和整个回合测量的所有值的平均值,平均速度(Vm).
2.5. 电机控制变量
对称指数(SI,%)被选为对称性度量。它能够量化对侧肢体产生的力之间的差异。SI,计算峰值力(SI_FPK) 和平均力 (SI_Fm).两者(SI_FPK和SI_Fm)按照[21]的建议计算:

哪里Xd是优势肢体产生的力, Xnd是非优势肢体产生的力。每个参与者都报告了哪些是他们的优势肢体和非优势肢体。虽然偶尔可以在文献中找到其他随机临界值,但我们还是选择了Herzog等人,他们将对称性定义为“左腿和右腿的外部动力学和运动学的完美一致”。因此,如果SI = 0%,SI被解释为完全对称,如果SI>0%,则SI被解释为不对称。由于目标是评估不对称的存在,而不是不对称的方向(即左侧或右侧的不对称),因此SI值以绝对值表示。
2.6. 统计分析
通过夏皮罗-威尔克检验检验数据分布的正态性。报告所有因变量的平均± SD和1%置信区间(95CI)。采用双向重复测量方差分析(α设置为95.0)分析游泳泳姿和条件的数据变化。在需要时,通过邦弗朗尼事后检验进行重复测量方差分析(α设置为05.0)。检验了双向方差分析的假设。每次违反球形度假设时,都会使用温室-盖瑟校正来调整F比的自由度。偏埃塔平方

被选为方差的标准化效应大小指数,并视为:(1)最小效应大小如果为0.02<
≤ 0.13;(2)如果0.13<,效果大小适中
≤0.26;(3)强效应大小如果
> 0.26。还进行了皮尔逊相关性以评估SI与速度之间的关联(α设置为0.05)。相关效应大小为:0 < |R|≤ 0.1 空;0.1 < |R|≤0.3小;0.3 < |R|≤ 0.5 中;和|R|>0.5强。所有统计程序均在 IBM 社会科学统计包 (SPSS) 中执行(v.21,IBM,纽约州纽约州,美国)。3. 结果
描述性和主要效果
所有动作和变异均表现为对侧肢体不对称。仰泳是最不对称的泳姿,其次是蝶泳、自由泳和蛙泳。KO条件引起最高的不对称性,其次是另一个打腿条件FK,FA,最后是AO(表2和表3)。
表 2.峰值 (F 的平均值 (M)、标准差 (SD) 和置信区间 (CI)PK) 和平均值 (Fm)优势(DL)和非优势(NDL)肢体的推进力和对称指数(SI),跨越自由行和仰泳的条件。

表 3.峰值 (F 的平均值 (M)、标准差 (SD) 和置信区间 (CI)PK) 和平均值 (Fm)优势(DL)和非优势(NDL)肢体的推进力和对称指数(SI),跨蛙泳和蝶泳条件。

游泳动作对SI_F有显著而强烈的影响PK(F3,39= 6.802, p = 0.001,
= 0.343),事后测试显示蛙泳与仰泳和蝶泳有显著差异(p < 0.05)(表4)。表 4.游泳泳姿和条件对峰值和平均推进力对称指数(SI)的交互作用和主要影响。

关于SI_Fm,观察到动作和病情都有显着而强烈的影响(F3,39= 4.93, p = 0.005,
= 0.275 和 F3.39= 7.777, p < 0.001,
分别= 0.374)(表4)。蝶泳是最不对称的泳姿,其次是仰泳、自由泳和蛙泳。两种打腿条件都比拉手臂更不对称。事后试验显示,蛙泳与蝶泳差异显著(p < 0.05),KO条件比FA和AO条件更不对称(p < 0.05)。峰值力的不对称性 (SI_FPK)与平均力的不对称性呈正相关且强烈相关(SI_Fm) 在每个控制条件下 (0.677 < r < 0.680)。未发现任何SI(SI_FPK和SI_Fm) 和任何速度变量。
4. 讨论
本研究的目的是评估推进力的对称性并检查它们对游泳速度的影响。所有划水和条件在力产生中均表现出对侧不对称性,这与游泳速度无关。
4.1. 不对称和对称指数
本研究中使用的SI最初由Robinson等人提出,多年来已被广泛用于评估几种运动和环境中的对侧不对称性。同时,最初由同一作者任意提出的10%临界标准已经获得了关注,并定期用于注意显着的对侧不对称性。文献中报道了不对称性,在众多选定的感兴趣变量中,例如跳跃、着陆、改变方向、跑步或赛艇,通常低于或接近10%。通常有报道,SI评分高于10-15%会影响表现,并可能增加肌肉骨骼损伤的可能性。然而,一些作者已经预先警告说,在平均不对称性较低的任务中,10%的值可能已经代表一个危险信号。另一方面,在游泳中,研究一致报告从低专家一直到精英游泳运动员的SI值更高,无论是否通过差压系统,系留测试或计算模拟测量。本研究与文献一起,发现每种动作和状况都有不对称性;而SI_FPK范围从6.73%到28%,SI_Fm范围为9.3%至35.74%(表2和表3)。只有三例低于10%的阈值指导。例如,所有动作和条件的所有不对称性的平均平均值为15.60±SI_F为6.22%PK和 17.14 ± 8.20% 为 SI_Fm(即10%以上)。因此,即使在精英运动员(如游泳)中,不对称现象也普遍存在,它们可能是有用的标志。因此,人们可能想知道主流的10%截止值是否应该作为对不对称进行分类的标准标准,至少在游泳中是这样。有趣的是,一些作者至少在陆地上人类运动技能方面提出了同样的问题。
4.2. 对称性、速度和性能
除了不对称值之外,在表2和表3中可以看出,在两个SI_F中发现的高标准偏差范围PK和SI_Fm在每一次动作和条件下。总体而言,SD等于或高于平均值,表示个体对侧不对称的很大范围。此外,目前的结果表明,SI_FPK与SI_F呈正相关且显著相关m在各种控制条件下都具有较大的效果大小。这意味着不对称虽然高度个体化,但也有些慢性,即那些峰值更不对称的不对称性也将在整个游泳比赛中产生最高的不对称力。即使在蛙泳和蝶泳中,考虑到拉腿和腿打的同时性质,人们会期望一个小的SI,手/脚力量的产生也存在不对称性。
由于运动控制奇点,水下路径和肢体方向的轻微对侧运动学差异都可以证明推进力产生的不对称性是合理的。此外,协调性差会导致打腿不对称,导致手臂拉扯不对称。文献表明,推进力的不对称可能会影响身体对齐和阻力,因此,根据目前的结果,人们可能会认为纠正峰值推进力的不对称性将减少整个游泳比赛的不对称性。然而,精英游泳运动员似乎能够抵消他们的不对称性,仍然达到快速的速度并提供更好的表现。因此,人们可能会怀疑是否需要纠正这种不对称,甚至想知道这些不对称的用处。
在本研究中,SI_FPK和SI_Fm和 VPK和 Vm (表5),因此,尽管每个个体都有相对明显的不对称性,但对速度没有明显的影响。文献表明,在不对称的情况下,需要代偿性运动来改变身体位置。从理论上讲,在游泳中,这可能会转化为不需要的身体侧倾和倾斜,这将改变投影的正面区域,影响阻力,从而影响速度波动和速度。然而,文献并没有量化引发这种权衡所需的不对称程度。因此,至少对于本研究中发现的值,不对称性似乎不是速度本身的约束。因此,人们可以假设游泳可能是一项运动,在某种程度上,会从一定程度的不对称中受益,可能超过10%。有趣的是,在陆地上的人类步态中也提出了同样的推理。在一项针对精英跑步者的研究中,Ueberschär等人发现关键生物力学参数不对称。作者质疑观察到的不对称是否应被视为功能性和生理性,而不是“纠正”。他们提出,对侧不对称可能反映了运动员对个体解剖和/或骨科状况(例如脊柱侧弯或先天性/后天性关节错位)的合理而有效的测量。有趣的是,在陆地上的人类步态中也提出了同样的推理。朗曼在一篇关于尤塞恩·博尔特下肢不对称的文章中,引用了南卫理公会大学运动性能实验室正在进行的一项研究,提到右腿的峰值冲击力比左腿高13%。相反,左腿留在地面上的时间比右腿长约14%。Longman引用的关于不对称性的研究的作者提出,尤塞恩·博尔特可能已经自然地适应了他的步伐,以适应他的脊柱侧弯,优化了他的速度。此外,纠正他的不对称性不会加快他的速度,甚至可能减慢他的速度。如果他对称地奔跑,这对他来说可能是一种不自然的步态。
表 5.皮尔逊对称指数、运动学和动力学之间的乘积矩相关性

在游泳方面,Formosa等人认为上肢在人类游泳中可能具有不同的功能;一个肢体可能负责产生大力;而另一肢具有稳定位移方向的次要作用。我们的结果,以及关于游泳推进力不对称的文献报道的结果,似乎支持了这一推理。
作为带回家的信息,所有笔划和条件都呈现不对称的手/脚力产生。此外,峰值力产生不对称性较高的条件可能具有更高的平均力产生。但是,这些不对称可能不需要纠正。文献和我们的结果都没有设定一个不对称值的目标,超过这个值就会影响性能,但根据目前的结果,超过10%的人可能并不担心,因为它不会影响性能(速度)。
5. 结论
所有游泳划水和条件都会引起峰值和平均力的不对称。打腿是引起更广泛不对称的情况。
不对称对速度行为没有影响,这表明游泳中的运动控制将从一定程度的不对称中受益。
使用10%的临界标准来识别不对称性似乎不适合游泳运动。因此,本研究结果可为竞技游泳中不同泳姿和条件下对侧不对称的预期值和范围提供指导。









评论